아마도 가장 혼란스러운 점 중 하나는 스테퍼 모터의 데이터 시트에 나열된 코일 전압과 일반적으로 함께 사용되는 훨씬 더 큰 전원 공급 장치 사이의 불일치입니다. 데이터 시트에 3.4V의 코일 전압이 표시되어 있는 경우 48VDC 전원 공급 장치와 사용할 수 있는가? 아니면 80V 전원은 사용될 수 있는가?
정격 전압을 무시 하십시오. 대신 current rate에 주의 하세요.
대부분의 스테퍼 모터 드라이버가 초퍼 드라이브이기 때문에 이것이 가능합니다. 이 드라이브는 코일 전류의 상승을 모니터링하고 코일 전압을 무시합니다. 전류가 사전 정의 된 임계 값 (최대 모터 전류)에 도달하면 모터 전원을 차단합니다. 즉, 자릅니다. 드라이버의 최대 정격 전압을 초과하지 마십시오.
아래 사양의 step motor를 예로 들면,
정격 된 전압 : 12V
정격 전류 : 0.33A
권선 저항 : 32.6Ω
권선 인덕턴스 : 48mH
12V의 정격 전압은 최대 값이 아닙니다. 이 정격이 실제로 말하는 것은이 모터의 코일에 12V를 적용하면 코일 저항이 32.6Ω이기 때문에 약 0.33A의 전류가 설정된다는 것입니다.
>> 12V / 32.6Ω = 0.36A
만약 H-브리지 또는 매우 간단한 유형의 드라이버로 스테퍼를 제어하는 경우, 정격 전류 최대값을 초과하지 않도록 모터 전압을 12V로 제한해야 합니다.
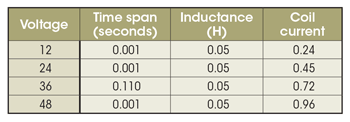
초퍼 드라이브의 경우 정격 전압을 초과해도 문제가되지 않습니다. 전압이 높을수록 모터가 자기 포화에 더 빨리 도달합니다. 모터는 완전히 포화되었을 때 가장 강합니다. 아래에 주어진 공식은 요점을 설명합니다. 이것은 주어진 시간 프레임 이후에 코일을 통과하는 전류를 계산합니다.
Voltage * (tim /inductance) = coil current
1 ms 동안 50mH 인덕터를 통과하는 전류는 적용된 전압에 비례하여 증가합니다.
모터가 필요한 토크를 내기에 충분히 포화되기 전에 스텝을 이동하면 스텝을 잃기 시작합니다. 실제로 모터가 특정 속도에서 스텝을 놓치고 있으면 더 높은 전압의 전원 공급 장치를 사용하십시오.
>> Chopper 방식의 stepper motor driver를 사용할 경우 motor driver의 정격 전압과 정격 전류를 고려한다.
public SubRTCForm formRTC = new SubRTCForm();
MainForm.cSystem.formRTC.TopLevel = false;
// TopLevel 속성을 false로 해 줄 것.
MainForm.cSystem.formRTC.TopMost = false;
panelManager.Controls.Add(MainForm.cSystem.formRTC);
MainForm.cSystem.formRTC.Visible = true;